- Accueil
- parcours de drone
- Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
4.7 (435) · € 14.99 · En Stock

We tackle the problem of flying time-optimal trajectories through multiple waypoints with quadrotors. State-of-the-art solutions split the problem into a pla

Residual dynamics learning for trajectory tracking for multi-rotor aerial vehicles

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight

Nonlinear Model Predictive Control for Multi-Micro Aerial Vehicle Robust Collision Avoidance

Automated vision-based structural health inspection and assessment for post-construction civil infrastructure - ScienceDirect

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight

PDF] A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight
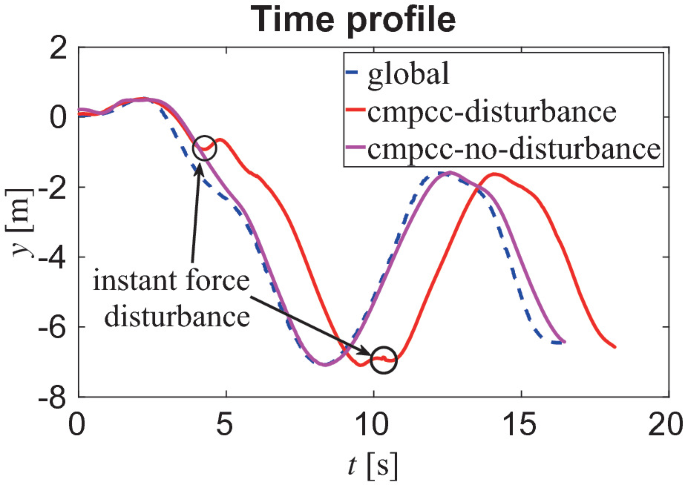
CMPCC: Corridor-Based Model Predictive Contouring Control for Aggressive Drone Flight
Drones, Free Full-Text

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight
Applied Sciences, Free Full-Text

PDF) A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight

PDF) Time-Optimal Online Replanning for Agile Quadrotor Flight
:max_bytes(150000):strip_icc()/koala_and_joey-bf5335dcd4a54f049e6dfff21c3af8b9.jpg)










